Contre toute attente, mois qui n’ai jamais été un écouteur (SWL) passionné, je me suis pris au jeu de la réception des signaux ADS-B provenant des avions survolant ma région du delta du Mékong.
J’avoue que je considère toujours que ça va me passer dès que j’aurai épuisé l’aspect technique de la chose. Après avoir essayé les différentes solutions logicielles sous Windows, je suis passé à une solution autonome sous Linux. Mon ami Benoît ma gentiment mis à disposition une CubieBoard 2 (http://xv4y NULL.radioclub NULL.asia/2013/08/09/reception-de-la-cubieboard2/) qui traînait dans un de ses tiroirs (il lui préfère les Raspberry Pi) que j’ai utilisé pour démoduler les signaux I/Q du 1090 MHz provenant de la clef RTL-SDR, décoder les signaux et les envoyer sur le site web de FlightRadar24 (http://www NULL.flightradar24 NULL.com/10 NULL.51,106 NULL.14/7). La distribution Linux que j’ai choisi pour cela est Cubieez qui est basée sur Debian comme Rapsbian dont elle reprend une grande partie des éléments. La majorité des programmes compilés pour Rapsberry Pi (jeu d’instructions ARMv6) tournent sur la CubieBoard (ARMv7).
 (http://xv4y NULL.radioclub NULL.asia/wp-content/uploads/2013/08/100_3640 NULL.jpg)Cela prend environ 10% du temps CPU quand le AllWinner A20 tourne à 912 MHz. Cela m’a permis d’une part d’en réduire la cadence pour diminuer la consommation et la chaleur, et aussi d’envisager la transmission des données sur d’autres sites webs comme FlightAware (http://flightaware NULL.com) et PlaneFinder (http://planefinder NULL.net). Avec le CPU à 528 MHz, la partie démodulation et décodage (programme dump1090) prend environ 25-30% d’un coeur CPU, le reste (transmission des informations décodées sur 3 sites web) jamais plus de 10% du deuxième coeur.
(http://xv4y NULL.radioclub NULL.asia/wp-content/uploads/2013/08/100_3640 NULL.jpg)Cela prend environ 10% du temps CPU quand le AllWinner A20 tourne à 912 MHz. Cela m’a permis d’une part d’en réduire la cadence pour diminuer la consommation et la chaleur, et aussi d’envisager la transmission des données sur d’autres sites webs comme FlightAware (http://flightaware NULL.com) et PlaneFinder (http://planefinder NULL.net). Avec le CPU à 528 MHz, la partie démodulation et décodage (programme dump1090) prend environ 25-30% d’un coeur CPU, le reste (transmission des informations décodées sur 3 sites web) jamais plus de 10% du deuxième coeur.
Je vais donc vous donner mon avis sur les différents sites web et leurs solutions pour la réception des signaux avec clef RTL-SDR et l’envoi des informations, mais du point de vue du feeder (celui qui alimente les sites) et non de l’utilisateur. Le plus important est que les trois sites web testés fonctionnent parfaitement et que l’installation de leurs suites logicielles se fait sans difficultés particulières. Certaines sont plus aisées que d’autres, mais dans aucun cas je n’ai eu de difficultés bloquantes.
Le premier que j’ai installé est le package fr24feed expérimental de FlightRadar24 (http://forum NULL.flightradar24 NULL.com/threads/7563-Flightradar24-decoder-feeder-BETA-testing-(Win-RPi-Linux-OSX)). Il est disponible pour plusieurs plateforme (Windows, OS X, Linux) et plus important a été compilé sur les architectures ARM (Raspberry Pi et CubieBoard). Encore en version béta, il est pourtant déjà bien testé et sa documentation est assez claire. Sur une distribution Debian, l’installation se fait en une commande via un package .deb, ensuite la configuration est interactive et les logs assez complets. Il intègre une version modifiée du démodulateur/décodeur Dump1090 ainsi que le feeder par lui même qui envoie les données vers le site web. En creusant un peu, on peut “séparer” le fonctionnement des deux pour utiliser la sortie de dump1090 avec d’autres programmes. J’ai séché un peu sur ce sujet et rapidement quelqu’un m’a répondu sur le forum qui est une bonne source d’information.
Le package logiciel le mieux documenté est de loin PiAware, celui de FlightAware (http://flightaware NULL.com/adsb/piaware/build). La documentation est en français et décrit par le menu tous les aspects matériel (avec une liste de courses) et logiciels de l’installation, ainsi que les cas de figure où vous alimentez plusieurs sites web en même temps, ce qui n’est pas le cas de manière claire chez les autres. Une image complète de Rapsbian est disponible si vous installez sur un Rapsberry Pi. Dans les autres cas, la procédure d’installation (http://flightaware NULL.com/adsb/piaware/install) est elle-même est très simple avec là aussi un seul fichier package .deb à installer et quelques commandes supplémentaires à taper pour finaliser la configuration. Point positif, le code source est disponible et l’installation est très flexible. A noter que volontairement dump1090 n’est pas intégré dans le package.
Pour terminer, il faut avouer que PFclient (le feeder de PlaneFinder) est en retrait en terme de simplicité d’installation. Tout d’abord, il requiert l’installation préalable d’une librairie d’interpréteur JSNode plutôt lourde et dont l’installation n’est pas des plus évidente. Ensuite, le fait d’être basé sur ce language de programmation (issu du JavaScript) ajoute une couche. L’auteur est disponible par e-mail et m’a répondu très promptement en envoyant toutes les informations, mais celles-ci peuvent rebuter les moins aguerris. Au final cela fonctionne, mais la consommation de mémoire importante de JSNode peut poser problème sur les cartes Rapsberry Pi de première génération qui n’ont que 256 Mo de mémoire vive.
 (http://xv4y NULL.radioclub NULL.asia/wp-content/uploads/2015/02/PlaneFinderStatsCoverage NULL.png)Le site web le plus abouti est à mon avis celui de FlightRadar24. A la fois du point de vue utilisateur par la justesse de ses informations mais aussi par ses statistiques pour les “feeders” ADS-B qui alimente le site web. Tout est accessible rapidement en un clic ou deux. Les informations sont présentées sur une unique page, mais elles sont pertinentes avec un archivage des jours précédents. Il lui manque juste un comparatif entre les différents “feeders” comme le fait par exemple PlaneFinder. Ce site ajoute une vue historique sur les 7 derniers jours intéressante mais présente moins de chiffres (pas le nombre d’avions reçus chaque jour par exemple). PlaneFinder offre aussi une visualisation globale et personnelle de la couverture (voir ci-contre) qui est très informative pour connaître les performances de sa chaîne de réception.
(http://xv4y NULL.radioclub NULL.asia/wp-content/uploads/2015/02/PlaneFinderStatsCoverage NULL.png)Le site web le plus abouti est à mon avis celui de FlightRadar24. A la fois du point de vue utilisateur par la justesse de ses informations mais aussi par ses statistiques pour les “feeders” ADS-B qui alimente le site web. Tout est accessible rapidement en un clic ou deux. Les informations sont présentées sur une unique page, mais elles sont pertinentes avec un archivage des jours précédents. Il lui manque juste un comparatif entre les différents “feeders” comme le fait par exemple PlaneFinder. Ce site ajoute une vue historique sur les 7 derniers jours intéressante mais présente moins de chiffres (pas le nombre d’avions reçus chaque jour par exemple). PlaneFinder offre aussi une visualisation globale et personnelle de la couverture (voir ci-contre) qui est très informative pour connaître les performances de sa chaîne de réception.
Le site dont le back-office est le plus étoffé est sans contest FlightAware (http://flightaware NULL.com/adsb/stats/user/xv4y). Les statistiques offre plus ou moins les mêmes informations, mais avec un niveau de détail supérieur agréable si on ne veut pas aller voir les logs du récepteur en ligne de commande. Il y a aussi une comparaison avec les récepteurs “voisin” et même des classements très exhaustifs (http://flightaware NULL.com/adsb/stats/) ce qui est motivant pour améliorer les performances. Il est possible de commander intégralement le système du récepteur et de faire les mises à jour applicative et système via le site web, ainsi que de l’arrêter complètement. Personnellement je n’aime pas trop l’idée qui pose pour moi des problèmes de sécurité, mais c’est une solution agréable pour ceux qui ne sont pas fan de ligne de commande UNIX.
Au passage, j’ai encore amélioré ma chaîne de réception et je suis maintenant égal au “radar” officiel F-VVTS1 de FlightRadar24 installé à Ho Chi Minh Ville. J’ai tout simplement remplacé ma chaîne de changer de genre pour un connecteur directement soudé sur le câble. A 50 MHz la solution précédente ne posait aucun problème, mais à 1 GHz les pertes étaient loin d’être négligeables.

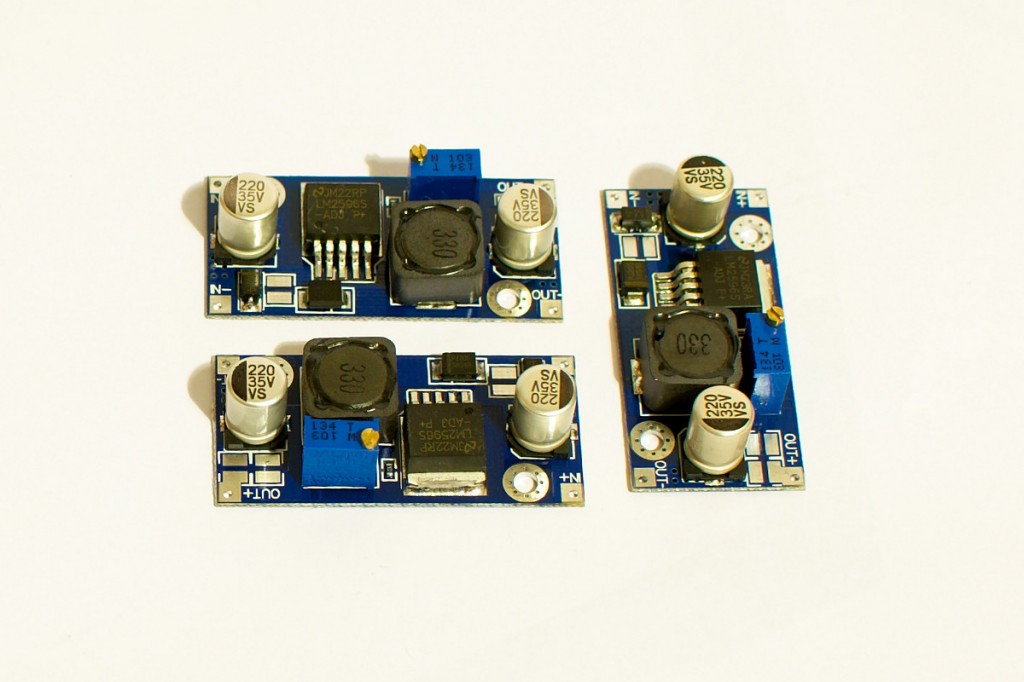
 (http://xv4y NULL.radioclub NULL.asia/wp-content/uploads/2015/02/LM2596-boards-1024x682 NULL.jpg)Ensuite, les usines chinoises se sont mises à produire des modules prêts à l’emploi utilisant la technologie de régulation de tension à découpage, et ces modules sont disponibles à la vente en ligne à des prix très raisonnables. Pour faire bref, sur une alimentation à découpage l’efficacité est accrue (plus de dissipation systématique en chaleur) au prix d’une complexité de mise en oeuvre et d’un besoin de filtrage supérieur car le découpage se fait en haute fréquence (quelques KiloHertz à quelques MégaHertz). Cerise sur le gâteau, les alimentations à découpage ou convertisseur de tension peuvent aussi se présenter en montage Boost ou Step-Up pour produire une alimentation en sortie supérieure à celle en entrée. C’est l’idéal pour compenser le déchargement d’une batterie de secours, passant de 13,8V à 12V, mais la sortie du régulateur restant à 13,8V.
(http://xv4y NULL.radioclub NULL.asia/wp-content/uploads/2015/02/LM2596-boards-1024x682 NULL.jpg)Ensuite, les usines chinoises se sont mises à produire des modules prêts à l’emploi utilisant la technologie de régulation de tension à découpage, et ces modules sont disponibles à la vente en ligne à des prix très raisonnables. Pour faire bref, sur une alimentation à découpage l’efficacité est accrue (plus de dissipation systématique en chaleur) au prix d’une complexité de mise en oeuvre et d’un besoin de filtrage supérieur car le découpage se fait en haute fréquence (quelques KiloHertz à quelques MégaHertz). Cerise sur le gâteau, les alimentations à découpage ou convertisseur de tension peuvent aussi se présenter en montage Boost ou Step-Up pour produire une alimentation en sortie supérieure à celle en entrée. C’est l’idéal pour compenser le déchargement d’une batterie de secours, passant de 13,8V à 12V, mais la sortie du régulateur restant à 13,8V.
 (http://xv4y
(http://xv4y (http://xv4y
(http://xv4y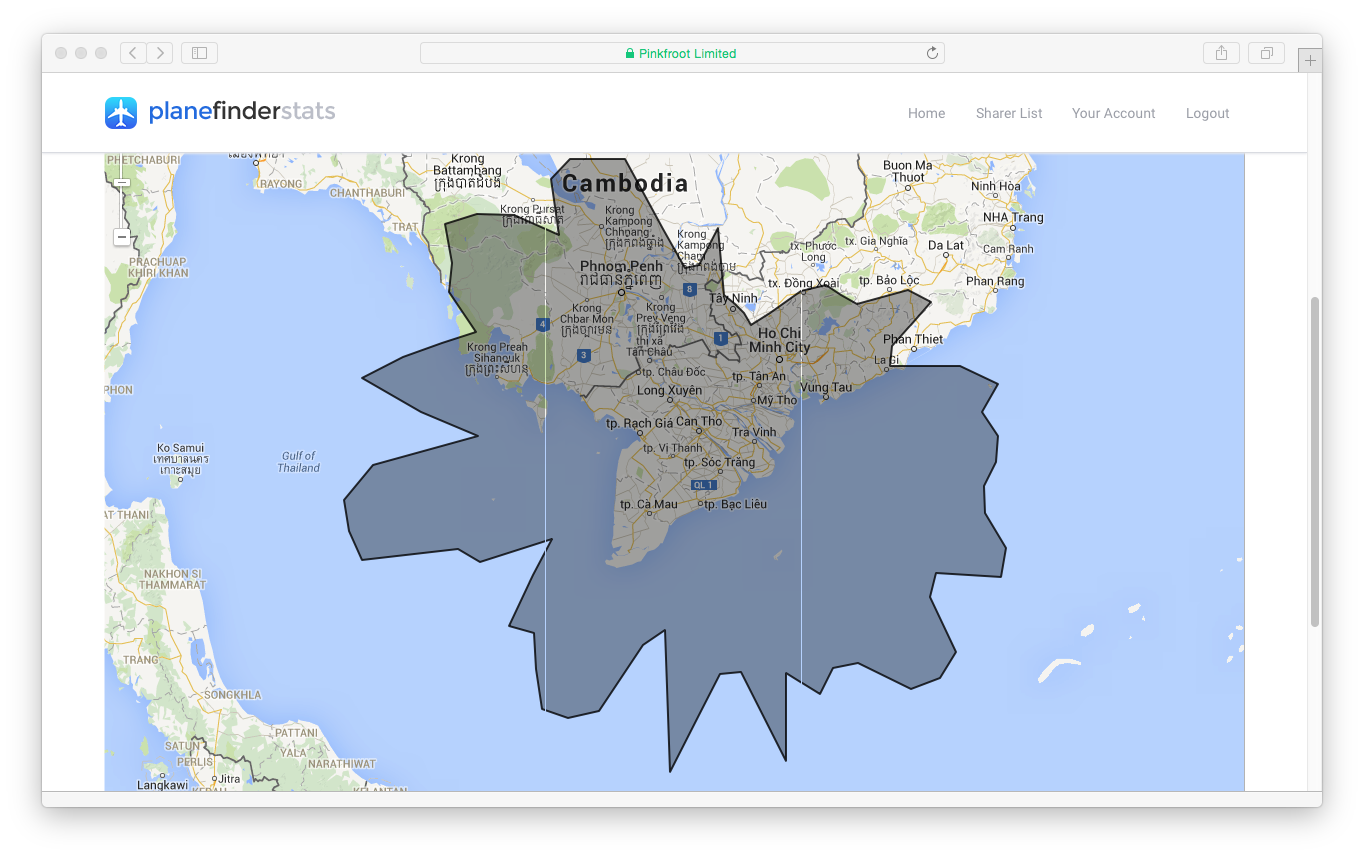

 (http://lpistor
(http://lpistor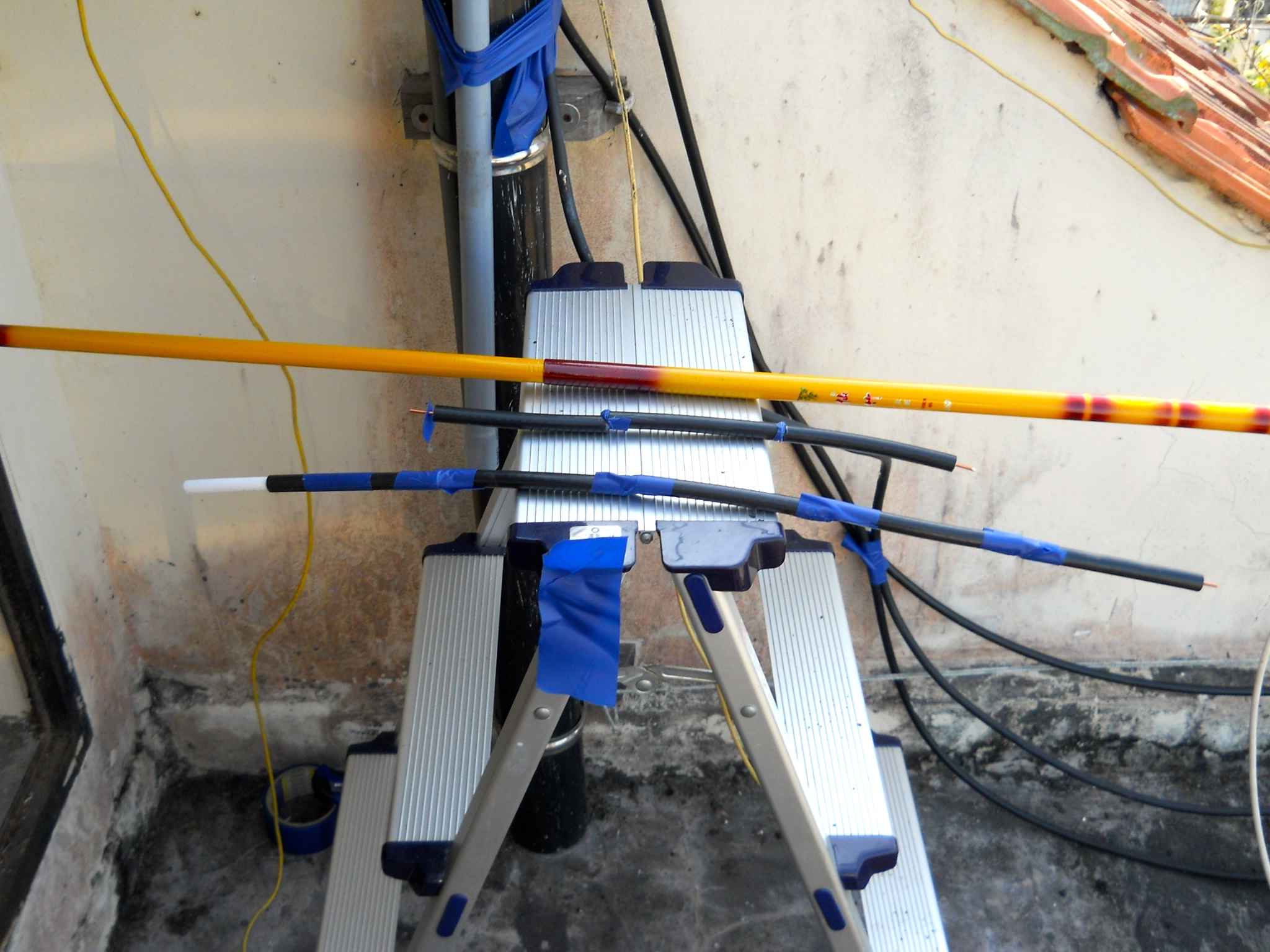
 (http://xv4y
(http://xv4y (http://xv4y
(http://xv4y
 J’ai recommencé à jouer avec la
J’ai recommencé à jouer avec la  (http://xv4y
(http://xv4y (http://xv4y
(http://xv4y
 (http://xv4y
(http://xv4y