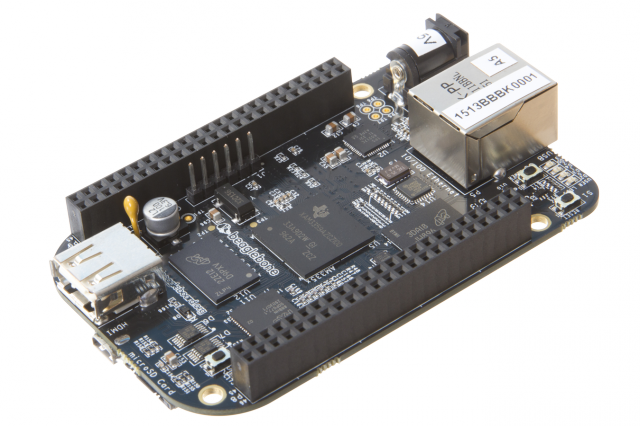
Voici une platine ordinateur embarqué qui n’est pas nouvelle (elle a un an) mais que je viens de découvrir grâce à DG0OPK (http://www NULL.qslnet NULL.de/member/dg0opk/Cubieboard_May2013 NULL.html) qui fait tourner des applications comme WJST, WSPR ou FLdigi dessus. Embarquant un coeur Cortex-A8 et 4G de Flash, elle est très comparable à la BeagleBone Black (http://xv4y NULL.radioclub NULL.asia/2013/04/23/un-beaglebone-avec-processeur-arm-cortex-a8-a-1ghz-pour-45/) dont je vous ai parlé il y a quelques temps.
 (http://xv4y NULL.radioclub NULL.asia/wp-content/uploads/2013/07/Cubieboard NULL.jpeg)Le CPU est ici un AllWinner A10 que l’on trouve à tour de bras dans les tablettes tactiles bon marché qui fleurissent dans les magasins ici. Je vous déconseille d’acheter ces tablettes car même si elles sont bon marché le reste des composants est très bas de gamme et en particulier l’écran vous fera souffrir et la batterie vous lâchera probablement au bout de quelques mois.
(http://xv4y NULL.radioclub NULL.asia/wp-content/uploads/2013/07/Cubieboard NULL.jpeg)Le CPU est ici un AllWinner A10 que l’on trouve à tour de bras dans les tablettes tactiles bon marché qui fleurissent dans les magasins ici. Je vous déconseille d’acheter ces tablettes car même si elles sont bon marché le reste des composants est très bas de gamme et en particulier l’écran vous fera souffrir et la batterie vous lâchera probablement au bout de quelques mois.
Le CPU AllWiner A10 (http://en NULL.wikipedia NULL.org/wiki/Allwinner_A10) est par contre plutôt intéressant avec un coeur ARM Cortex A8 avec 256ko de cache capable de 1GHz voire un peu plus et un GPU intégré Mali400. C’est du point du vue performance très similaire au Texas Instruments AM335 de la BeagleBone Black, et c’est beaucoup plus puissant que ce qu’il y a un dans Raspberry Pi. Les périphériques sont semblables à ce qu’on trouve ailleurs avec comme points forts et grosses différences un port SATA, 1Go de RAM et 4Go de Flash (2Go sur la Beagle Bone).
De nombreuses variantes du système d’exploitation Linux ont été portée sur cette plateforme dont Android 4.0 (ICS), Ubuntu Desktop 12.04, Ubuntu Server 13.03, Raspbian, Arch Linux, Fedora… La puissance de traitement disponible et le port SATA permet d’envisager de vraies applications de serveur embarqué ou du traitement de signal lourd comme pour une radio SDR.
Le prix est de 49$ et la diffusion semblable aux autres produits même si les distributeurs sont moins connus. L’avantage pour moi c’est que les concepteurs et producteurs étant en Chine, ils expédient plus volontiers au Viêt-Nam où acheter les autres ordinateurs embarqués reste compliqué.
Un nouveau modèle embarquant un CPU AllWiner A20 est disponible pour le même prix mais déjà en rupture de stock. Le A20 semble compatible broche à broche avec le A10 ce qui a facilité la production du nouveau modèle. Il comporte deux coeurs ARM Cortex A7 (http://en NULL.wikipedia NULL.org/wiki/ARM_Cortex-A7_MPCore) et un GPU double-coeur Mali 400. L’amélioration en terme de performances peut être significatives pour les applications tirant parti du multi-processing ou dans le cas où vous voulez faire tourner un mini-serveur avec serveur web et base de données par exemple (je pense à quelqu’un là). Le prix est un peu plus élevé à 59$. Les OS disponibles sont Android 4.2 et Ubuntu Desktop 12.04.
Mes seules craintes sur ce produit sont le suivi à long terme et le support communautaire. Raspberry Pi et BeagleBone offrent l’avantage d’avoir beaucoup de monde qui travaille sur les projets et des engagements de Qualcomm et Texas Instruments. Je ne suis pas sûr que les chinois aient la même fiabilité sur le long terme. Personnellement j’hésite à en acheter un car mon budget pour ce type de gadgets est épuisé pour les prochains mois. Il faudrait que je le passe sur mes “projets professionnels” mais honnêtement, je suis déjà bien occupé et dans quelques mois de nouveaux produits sortiront j’en suis sûr.


 (http://symmetryselectronics NULL.distributorpress NULL.com/2013/10/09/unboxing-the-amd-based-gizmo-explorer-kit-and-intel-minnowboard/)Le site Symmetry Electronics a publié un comparatif intéressant entre les deux cartes à ordinateurs embarqué avec architecture x86 : la Gizmo Explorer Kit (avec AMD G-Series) et la MinnowBoard (avec Intel Quark X1000). En bref, les deux cartes sont intéressantes et ont chacune des points forts et des points faibles selon les usages. Il convient donc de faire une étude précise de vos objectifs.
(http://symmetryselectronics NULL.distributorpress NULL.com/2013/10/09/unboxing-the-amd-based-gizmo-explorer-kit-and-intel-minnowboard/)Le site Symmetry Electronics a publié un comparatif intéressant entre les deux cartes à ordinateurs embarqué avec architecture x86 : la Gizmo Explorer Kit (avec AMD G-Series) et la MinnowBoard (avec Intel Quark X1000). En bref, les deux cartes sont intéressantes et ont chacune des points forts et des points faibles selon les usages. Il convient donc de faire une étude précise de vos objectifs.
 (http://xv4y
(http://xv4y (http://xv4y
(http://xv4y
 (http://xv4y
(http://xv4y (http://xv4y
(http://xv4y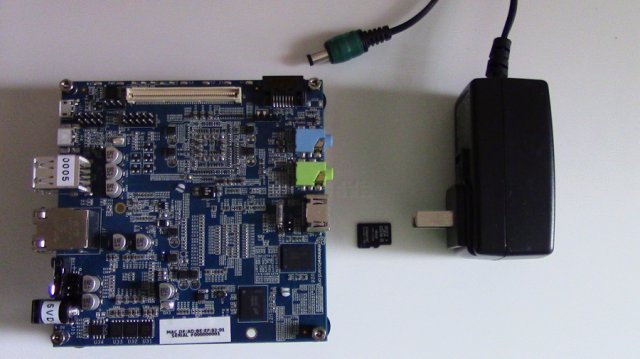
 (http://arstechnica
(http://arstechnica (http://xv4y
(http://xv4y
 (http://xv4y
(http://xv4y (http://www
(http://www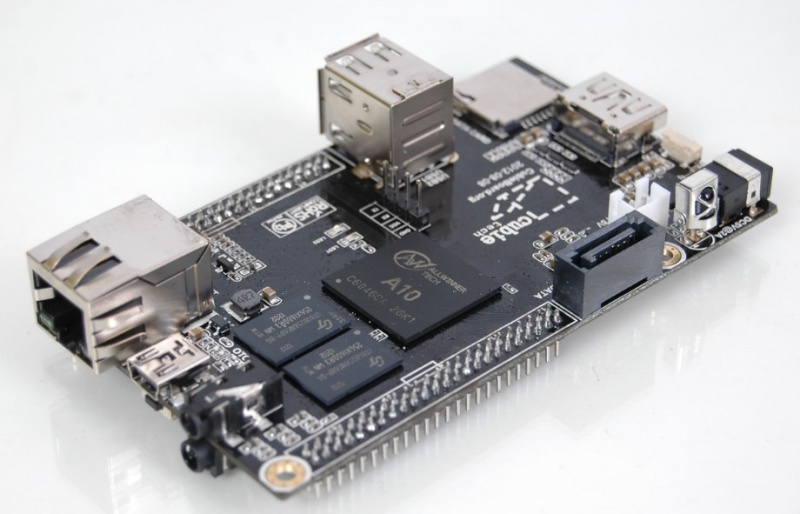
 (http://xv4y
(http://xv4y (http://xv4y
(http://xv4y